
XDU 计算复杂性原理 期末复习
关于
主讲教师:Patrick Rebeschini
复杂类相关证明
关联
NTIME 与 NSPACE
NTIME(t(n)):
所有能被某台NTM在时间O(t(n))内判定的语言的集合。
NSPACE(s(n)):
所有能被某台NTM在空间O(s(n))内判定的语言的集合。
General
P ⊆ NP ⊆ PSPACE ⊆ EXPTIME
P ⊆ coNP ⊆ PSPACE
NP ⊆ EXP
P ⊊ EXPTIME
PSPACE ⊊ EXPTIME
NL = coNL (Immerman-Szelepcsényi Theorem)
P = coP
P ?= NP
NP ?= coNP
P ?= PSPACE
NP ?= PSPACE
重点说明
四大复杂类(P,NP,(N)PSPACE,(co)NL)判断他们之间的关系,并说出原因。
P⊆NP:
For any L ∈ P, we can construct a NP verifier, certification w can be empty or ignore, verifier V(x, w) runs the P's algorithm A(x), accepts iff A(x), else reject.
(Deterministic machines are special case of Nondeterministic machines.)
L⊆NL:
Same as P and NP.
(Deterministic machines are special case of Nondeterministic machines.)
NP ⊆ PSPACE:
思路:NP由NTM决定,NTM是多项式时间,所以NTM只能在NTIME内访问NSPACE,由Savitch定理可以把NSPACE转换成DSPACE,就可以说明NP属于PSPACE。
For any L ∈ NP, There's a nondeterministic Turing Machine M that for any input w(length is n), M can define L in poly time p(n).
Since machine M can run at most p(n) steps, it can visit at most O(p(n)) tape cells, Therefore it uses polynomial space. In particular, NTIME(p(n)) ⊆ NSPACE(p(n)). Hence, L ∈ NSPACE(p(n)).
By Savitch's Theorem, for any s(n) >= logn, NSPACE(s(n)) ⊆ DSPACE(s(n)^2).
Let s(n) = p(n), L ∈ DSPACE(p(n)^2).
Because p(n) is polynomial, p(n)^2 is also polynomial.
So, DSPACE(p(n)^2) ⊆ PSPACE, L ∈ PSPACE.
So, NP ⊆ PSPACE.
NL ⊆ P:
For language L ∈ NL, for any input w(length is n),NL machine at most uses O(logn) bits.
O(logn) bits can represent 2^(O(logn)) = n^(O(1)) situations, So we can use BFS to visit all situations, this problem is in P.
so NL ⊆ P.
NL = coNL:
Immerman-Szelepcsényi theorem.
PSPACE = NPSPACE:
Savitch Theorem.
首先 PSPACE ⊆ NPSPACE 显然成立
然后,我们引入Savitch定理:
NSPACE(s(n)) <= DSPACE(s(n)^2) , s(n) >= logn,
由于我们讨论的是Poly下的,所以取s(n) = n^k
所以NSPACE(n^k) <= DSPACE(n^2k)
DSPACE(n^2k) ⊆ PSPACE
所以 NPSPACE ⊆ PSPACE
综上, NPSPACE = PSPACE.
规约
多项式时间规约
对数空间规约
L

证明在LogSpace内,我们只需要写一个算法,让其只占用最多LogSpace空间即可。
比如这一题,我们使用一个计数器,初始化为0,然后此时从最左边开始读取,遇到左括号就+1,遇到右括号就-1,注意,如果当前数值为0且遇到了右括号,就reject。然后等读取到最后一个括号并且对数值进行操作后,如果数值不是0,就reject。如果数值是0,就accept。
这个算法只用到了当前括号索引和一个计数器,都是数字,数字(二进制或者十进制)都是Log_2(xxxx)或者Log_10(xxxx),即都是LogSpace的,所以A是L。
NL & coNL
证明NL的时候,如果觉得复杂,就把它取反,证明某个问题是coNL,然后由Immerman-Szelepcsenyi定理,coNL=NL,即可得到其是NL。
NL问题的证明,作业题中如二分图问题就是NL问题,详见”二分图是NL“。
NL-COMPLETE
NLC的证明与NPC证明一样,只要说明一个语言L是属于NL的,且是NL-Hard,他就是NLC。
同样我们需要选择一个NL-Hard的问题来归约到它,才能证明它也是NL-Hard。
常用来规约的NL-Hard问题有PATH(也叫ST-CONN)。
PATH = {<G, s, t>| 图G中,s 和 t 之间有有向/无向的路径}.
2-SAT(子句有两个literal的布尔可解性问题,可以由PATH规约来)
规约方案:
对PATH来说,对每个点抽象成x_u布尔变量,如果是真就是可达,如果是假就是不可达。
然后,对于每个边,加入蕴含,比如u->v有边,就加入x_u -> x_v蕴含式(也就是非x_u 析取 x_v),符合2SAT。
同时,加入两个单一字句(x_s和非x_t),代表x_s是初始节点,x_t是最终节点,初始节点肯定可达,最终节点在没有路径的情况下不可达。
这样,PATH问题就变成了2-SAT的问题。同时2SAT也可以来证明有向图。
证明其是NL-Hard:
使用Path来规约,Path = {<G, s, t> | 图G中有s到t的有向路径}。
我们通过构造一个新图G',使得G'中存在原来的V和E,然后遍历所有节点(保存curr节点的index,s和t节点的index),加入新边:所有节点->s,t->所有节点,这样即保留了s和t之间原来的路径,又加了t到s的路径,并且由于保存的都是index,所以是Logspace下的规约,所以PATH <=(L) STRONG-CONNECTED,STRONG-CONNECTED是NL-Hard。
下来证明其是NL:
考虑其补问题coSTRONG-CONNECTED = {<G, u, v> | u节点与v节点没有有向路径}。
我们依旧使用NL的算法,保存curr_index, u_index, v_index,然后对图进行遍历,空间依旧是LogSpace,所以co-STRONG-CONNECTED是NL,由Immerman-Szelepcsenyi定理得 coNL = NL,所以STRONG-CONNECTED 是 NL。
所以, STRONG-CONNECTED 是 NL-Complete。
P

如果P是P class
对Union,设A,B∈P,则存在多项式时间内算法Ma(x),Mb(x),分别决定A和B
A∪B意思就是输入x,Ma和Mb中,只要有一个接受就接受。
时间复杂度是两个相加,也是多项式。
对Concatenation:
前面一样,但是输入是w,对w进行切分,从首位到末位,只要有一个输入能分别让Ma,Mb接受,就接受
时间复杂度,由于要切分n+1次,所以是(n+1)poly(n),依旧是多项式时间
对Complement:
将结果翻转。

这一题要证明TRIANGLE∈P,只需要给出一个算法,让其在多项式时间内能解决即可。
这类题比较简单,比如这题就是可以给出,遍历图G,<a,b,c>为3个不同的节点,只要检测<a,b>,<a,c>,<b,c>之间是否存在边,即可说明G contains a triangle,对于遍历则是O(n)*O(n)*O(n) = O(n^3),属于多项式时间。所以TRIANGLE ∈ P。
NP
定义+扩展

图同构的证明。我们需要给出证书,和这个证书如何在多项式内验证的验证器。
图同构的意思是,存在一个双射(bijective)函数Π: V(G) -> V(H),使得:
任取u, v ∈ V(G), (u, v) ∈ E(G) <-> (Π(u), Π(v)) ∈ E(H).
证书就是Π函数。
我们只需要对于每个G中的边(u, v),计算(Π(u), Π(v)) ∈ E(H)是否成立即可。
所以时间复杂度在多项式时间内,所以ISO∈NP。

由于分解整数需要给出一个具体的答案,但是P和NP问题解决的都是可行/不可行这类的问题,所以我们需要构建一个问题。
HAVE-FACTOR = {<a, b, c> | a=yz,其中一个因子 b <= y <= c },证明这个问题是NP,因为我们可以给出一组a,b,c,我们只需要对所有b~c的整数遍历一遍,就可以确定a的一个因子y在[b,c]。由于P=NP,所以这个问题实际上可以在多项式内解决。对于任意一个整数,我们对其进行因子猜测,令a = 这个整数,b = 2,c = 这个整数,使用算法在Polytime解决HAVE-FACTOR问题,然后进行二分查找,由于二分查找也是多项式时间内,所以整个算法都是多项式时间的,最终我们就可以精确的找出y的值,然后对y进行递归的分解,由于对于一个整数n,它最坏的情况就是2的幂,也就是说,它最多有log_2(n)个因子,所以递归分解次数肯定是多项式内的,不断进行递归直到这个整数被完全分解,还是多项式时间。
coNP
定义+扩展
首先不能说明MIN-FORMULA是NP,所以根据题意就是属于P,因为MIN-FORMULA不一定属于NP。
正确做法是取其反。
MIN-FORMULA = {<φ> | 任取一个φ'与φ等价,φ'长度都不会少于φ}。
NOT-MIN-FORMULA = {<φ> |存在一个比 φ 更短的布尔表达式φ',且φ与φ‘在逻辑上等价}。
由于我们可以给出一个certification,可以在多项式时间内验证φ‘是否比φ短,多以NOT-MIN-FORMULA显然是NP。
所以MIN-FORMULA∈coNP,然后用上题目的条件 P = NP,由于coNP = coP = P,所以coNP = P。
所以MIN-FORMULA ∈ P。
第二问在PSPACE。
NP-COMPLETE
NPC问题是NP里最难的一类的判定问题。
证明L是NPC问题,我们需要先证明L是NP问题。
然后证明L是NP-Hard问题(即所有NP问题都可以多项式时间内规约到它)。
证明L是NP-Hard问题可以使用多项式规约的传递性,我们选择一个已知的NP-Hard问题,在多项式时间内归约到L,就可以证明L不比这个问题简单,就可以说明L是NP-Hard。
L∈NP + L∈NP-Hard --> L ∈ NPC.
常见用于规约的NPC问题有:
SAT 布尔公式φ可满足性。
哈密顿路径问题(一个路径,遍历了每一个点)。
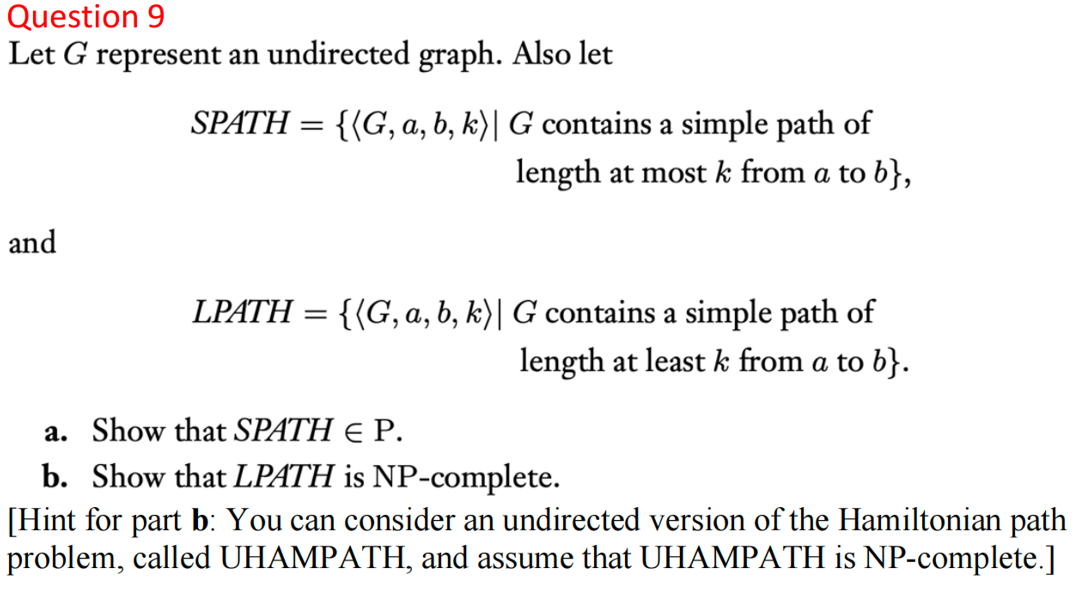
a. 用BFS遍历,BFS只用多项式时间就可以得到最短路径,看是否是小于等于k即可,所以SPATH ∈ P.
b.
先证明LPATH是NP:
给定一组从a到b的简单路径,我们可以在多项式时间内验证其是否至少是k,所以LPATH是NP。
再证明LPATH是NP-Hard:
由UHAMPATH规约,UHAMPTH = {<G, a, b>| 无向图G中从a到b有一条哈密顿路径}。
令UHAMPTH中的G有m个节点,我们令新图G‘=G,k=m-1,由于原图中a到b有一条哈密顿路径,长度肯定是m-1,因为只有m个节点。
所以新图中,a到b的路径最短至少就是m-1。而且我们规约只是设置了k,必然在多项式时间内完成。
所以UHAMPATH <=p LPATH。
所以LPATH 是 NP-Complete.
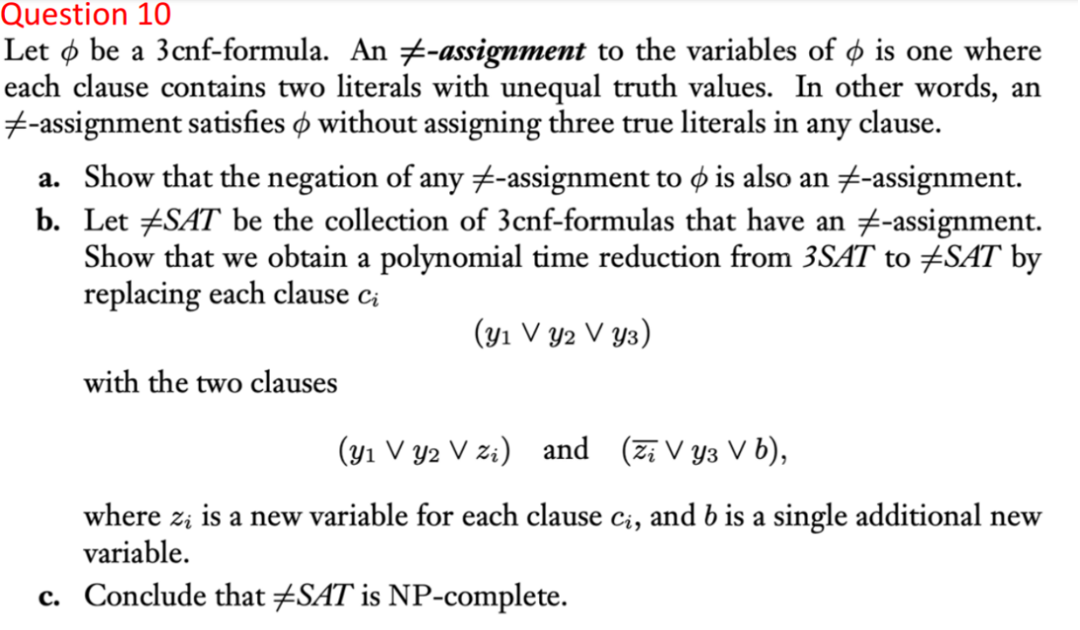
a. !=-asignment就是3CNF里面的literal,true和false至少一个,所以它的取反依旧是true和false至少一个,所以还是!=-assignment.
b. 3SAT就是3CNF的可满足问题,其中每个字句都是true,但是字句内的文字没有至少一个true一个false的要求,所以我们需要在这里进行多项式时间内的规约,让他每个字句都有一真一假。我们令3SAT中的每个字句拆为两部分,第一部分就是前面两个变量加上一个新变量Zi,第二部分是~Zi与最后一个变量,再加上一个新变量b,这样当SAT满足时,每个字句满足,也就是yi里面至少一个真,假如第一个或者第二个是true,zi可以为false,使第二个字句成立的同时,第一个字句中满足3CNF,如果y3也是真,b可以设置为假来满足3CNF,如果y1 y2全是假,zi设置为真,如果y3也是假,设置b为真即可。对于每组字句都进行这样的字句扩充,时间复杂度是多项式时间内的,完成了多项式时间规约。
所以 3SAT <=p !=SAT。
c. 由于可以给定一组certification,我们可以在多项式时间内计算!=SAT的3CNF取值是否为真,所以!=SAT是NP问题。
由于3SAT是NP-Complete问题,且!=SAT可以由其规约而来,所以!=SAT是NP-Hard问题。
综上所述,!=SAT 是NP
PSPACE
定义+扩展
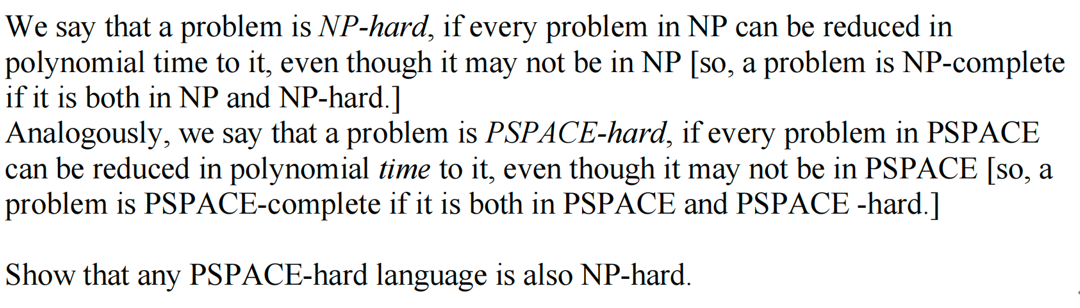
要证明PSPACE-Hard问题都是NP-Hard问题,要用到:NP 包含于 PSPACE 这个基本定理。
取语言 A ∈ PSPACE-Hard,意味着 任意L∈PSPACE,都能在多项式时间内规约到A。
任意取L' ∈ NP,由于NP 包含于 PSPACE,L‘∈PSPACE,所以L’可以在多项式时间内归约到A。
所以A也是NP-Hard。

重点:使用SAT当作桥梁,用规约来反向推。
由于SAT是NP-Complete,所以SAT是NP-Hard。
由题可知,SAT是PSPACE-Hard。
由于PSPACE包含NP,所以SAT是PSPACE-Complete。
由于SAT是PSPACE-Complete,所以任意L∈PSPACE,都可以多项式时间归约到SAT。
由于SAT是NP,所以L是NP。
所以,PSPACE 包含于 NP,又 NP 包含于 PSPACE,所以PSPACE = NP。
第一问在coNP。
解决第二问:
要证明MIN-FORMULA是PSPACE,我们需要给出一个在多项式空间内能验证MIN-FORMULA的算法。
第二问就没有假设P=NP了。
MIN-FORMULA = {<φ> | 任意φ' === φ, |φ‘| >= |φ|}。
我们只需要对n < |φ|的布尔公式进行枚举检查:
首先枚举所有长度小于|φ|的布尔公式进行枚举,
对于每个布尔公式,检查它们是否与φ的变量相同,并且检查它们是否等价。
如果等价,就说明找到一个比φ更短的formula,返回reject。
如果对于所有的布尔公式都没有找到一个比φ更短的,返回accept。
空间占用:只占用保存当前布尔公式的空间,这部分空间是O(n),测试等价时保存所有变量的取值{0, 1},一个长为n的布尔公式最多有n个变元,所以空间占用最多为O(n),所以MIN-FORMULA∈PSPACE。
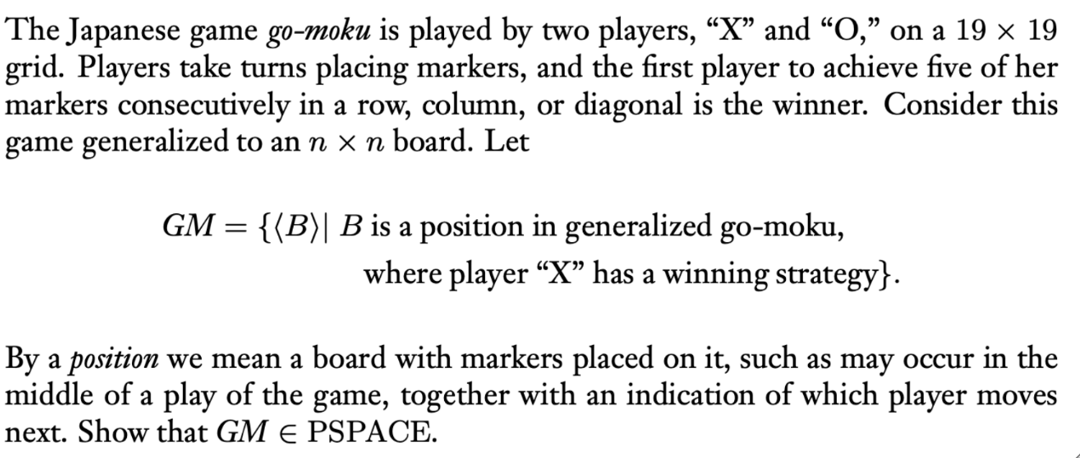
博弈类问题,证明是PSPACE也是一样的,需要你编写一个算法,使用这个算法来证明原问题是能在多项式空间内被解决的即可。
GM的意思是,从当前局面开始,对“X”有一个必胜的策略,也就是无论“O”怎么走,“X”只要按照必胜策略,就能赢。
考虑以下算法:
i) 从局面B开始,
ii) 假如轮到X下棋,且X这一步就能赢,返回true,
iii) 假如轮到O下棋,且O这一步就能赢,返回false,
iv) 假如轮到X下棋,但是这一步不能赢,则需要在子局面进行递归:
对于n*n的棋盘,每个位置都下一遍,递归调用该算法,并且设置初始子局面是下的某个位置。
对于所有的返回值,如果只要有一个是true,就返回true。
v) 假如到O下棋,但是这一步不能赢,则需要在子局面进行递归:
对于n*n的棋盘,每个位置都下一遍,递归调用该算法,并且设置初始子局面是下的某个位置。
对于所有的返回值,必须所有的局面是true,才能返回true(因为这是O下的,但是我们题目要求O不能决定胜负,因为从这个B局面开始X是必胜的)。
对于结果,算法结果是true则返回accept,算法结果如果是false,则返回reject。
空间分析:由于是递归,每次递归需要保存n*n的棋盘,空间复杂度是O(n^2),由于棋盘最大是n*n,所以递归深度最大也就是n^2,所以,空间复杂度是O(n^4),依旧多项式。
所以 GM ∈ PSPACE。
SAT 的定义以及证明应用
SAT问题的定义,逻辑公式的可满足性(如何判断)
怎么去证明SAT的问题,思路是什么
SAT是NPC问题(Cook-Levin定理)
定义
SAT = {<φ>| φ is satisfiable boolean formula}。
重点
复习作业题里面SAT证明的应用

先证明DOUBLE-SAT是NP:
因为给定一组certification,可以在poly-time内去验证这个问题,所以它是NP类问题。
下来证明DOUBLE-SAT是NP-Hard:
将SAT多项式时间归约到DOUBLE-SAT,SAT = {<φ> | φ是可满足的布尔表达式},DOUBLE-SAT={<w>|w = φ AND (x or NOT x)},由于加入一个变元是在多项式时间内的,且加入一个变元后,该布尔公式有至少两个满足赋值(x=0或者x=1),φ本来就可满足。所以SAT <=p DOUBLE-SAT,DOUBLE-SAT是NP-Hard。
所以DOUBLE-SAT是NP-Complete。
CNF 的子句求值解析
字句(clause)是若干文字(literal)的OR。
C=(ℓ1∨ℓ2∨⋯∨ℓk),求值规则:只要有一个文字为真,子句就是真。
CNF是若干字句的AND:
F=C1∧C2∧⋯∧Cm,求职规则:必须所有子句都是真,CNF才是真。
图灵机模型
空间复杂度/时间复杂度的关联推导
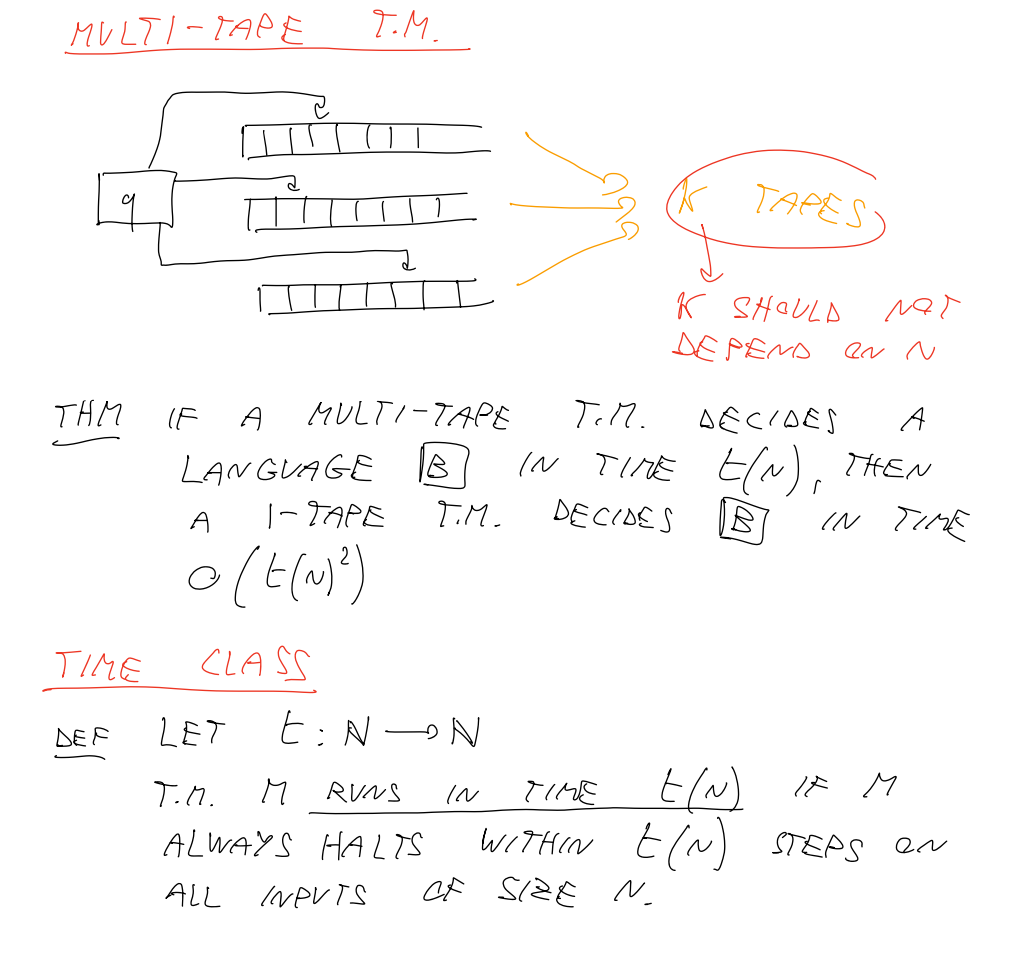
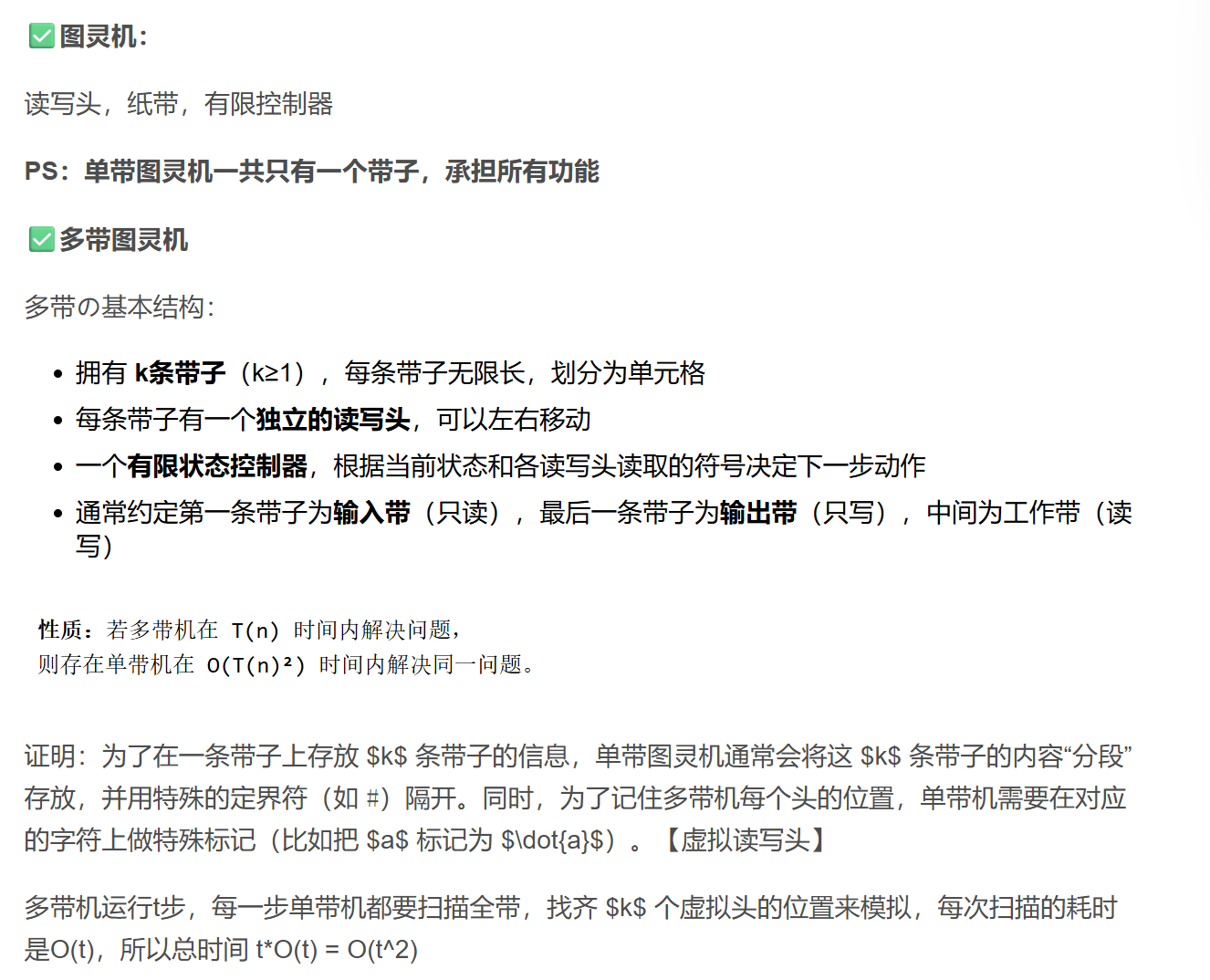
多带图灵机的运行机制,如何分析图灵机的运行时间上限
定义
多带图灵机
时间与空间复杂度

L ∈ TIME(f(n)) means: Exists a deterministic Turing Machine M and a constant c. For any length n inputs, M decides L in at most c*f(n) steps.
So, TIME(2^n) 包含于 TIME(2^(n+1)), 因为 2^n < 2^(n+1),L ∈ TIME(2^n),那么L也属于后面
We need to prove TIME(2^(n+1)) 包含于 TIME(2^n):
TIME(2^(n+1)) -> O(2^(n+1)), for any input length n, M decides L in at most c 2^(n+1) = (2c) 2^n. -> TIME(2^n)
So 后者包含于前者,所以相等
时间上界=>空间上界
DTIME(t(n)) ⊆ DSPACE(t(n)), NTIME(t(n)) ⊆ NSPACE(t(n)).
理由:在时间t(n)内,head最多遍历t(n)个cells,因为图灵机运行的规则是head可以在每一步右移/左移/不动,所以它使用的空间不会超过O(t(n)).
空间上界=>时间上界
DSPACE(s(n)) ⊆ DTIME( 2^s(n) )
NSPACE(s(n)) ⊆ DTIME( 2^s(n) )
理由:对空间为s(n)的机器,其配置数最多是2^(O(s(n))),用确定性方法再其上进行BFS,最多就是指数时间。
N空间上界=>D空间上界
引入Savitch定理。
NSPACE(s(n))⊆DSPACE(s(n)^2)(s(n)≥logn)
这个定理可以直接推导出NPSPACE=PSPACE,也可以推出NP⊆PSPACE。
多带图灵机运行机制
1带模拟k带
若k带图灵机使用t(n)的时间,则1带图灵机可以在O(t(n)^2)内模拟。
理由:把k带的纸带交错编码在1带上,每模拟一步,需要扫描一遍编码区,并且找到各头位置并更新,扫描的长度是O(t),重复t次就是O(t^2)。
无向图相关考察
二分图 定义+充要条件 2SAT?
二分图定义
二分图的充要条件
可 2-着色:能用两种颜色给所有顶点染色,使得每条边的两个端点颜色不同。
显然是成立的,因为二分图就是分成两个集合。
没有奇环:图中不存在长度为奇数的简单环(odd cycle)。
二分图=>没有奇环:
证明它的逆否命题,如果有奇环,那么对其相连的节点,从x1开始编号到xn+1,然后x1与xn+1相连,显然是奇数个环,这时候会出现问题,也就是如果划分集合,初始节点会即在L集合也在R集合,所以矛盾,所以不是二分图,于是原命题得证。
没有奇环=>二分图:
既然没有奇环,选择一个起点u,对于其距离为奇数的节点放入L集合,否则放入R集合,若存在一条边把两个同集合的节点连接起来,就会形成一个奇环,矛盾,所以原命题得证。
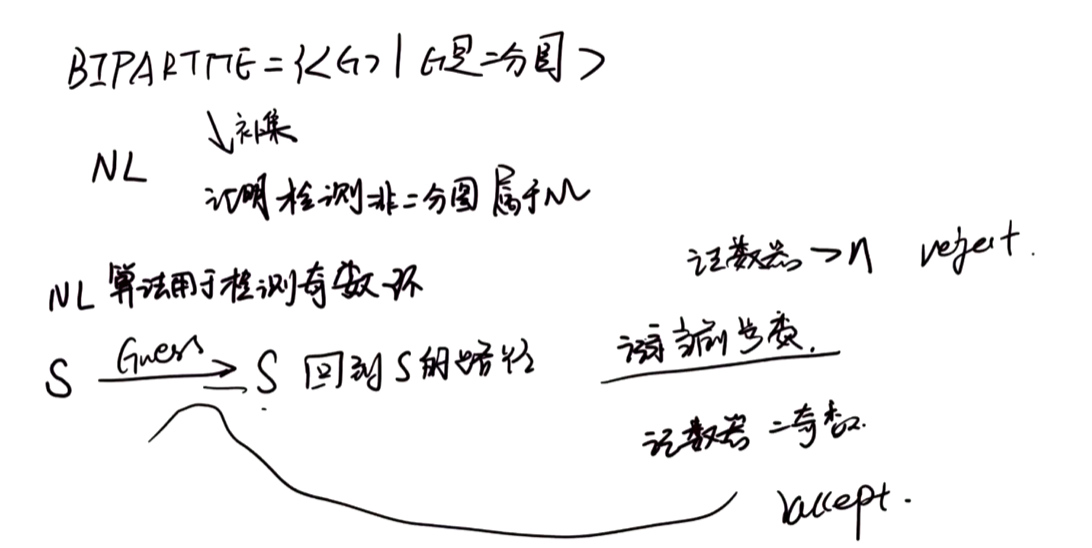
二分图问题是 NL
使用一个NL算法检测奇数环,如果是奇数环ACCEPT,然后由于coNL = NL,所以二分图就是NL问题。
二分图问题规约到2SAT
二分图的判定可以规约为2SAT问题。
对于每条边(u, v),使用XOR进行2CNF编码:

证明:
如果φG可满足,则图G是二分图。
对于一条边,采用φG来着色,对于其为真的边,着色为1,否则着色为0,由于x_u 析取 x_v,则u和v不可能是同假,由于非x_u析取非x_v,则u和v不可能是同真,所以u和v只能是两种不同的颜色,所以G是二分图。
如果G是二分图,则φG可满足。
如果图G二分,则其可以划分出两个集合L和R,其内节点分别着色为0和1.
显然对任意边(u, v),u和v节点不能在上面的同一个集合中。
所以x_u 析取 x_v 为真,且非x_u析取非x_v为真,所以整个φG也就是真了。